#重点 每个阶段不同信号的设置,容易忽略写使能信号
4.4 单周期控制器的实现
回顾Next Address Logic 的电路图: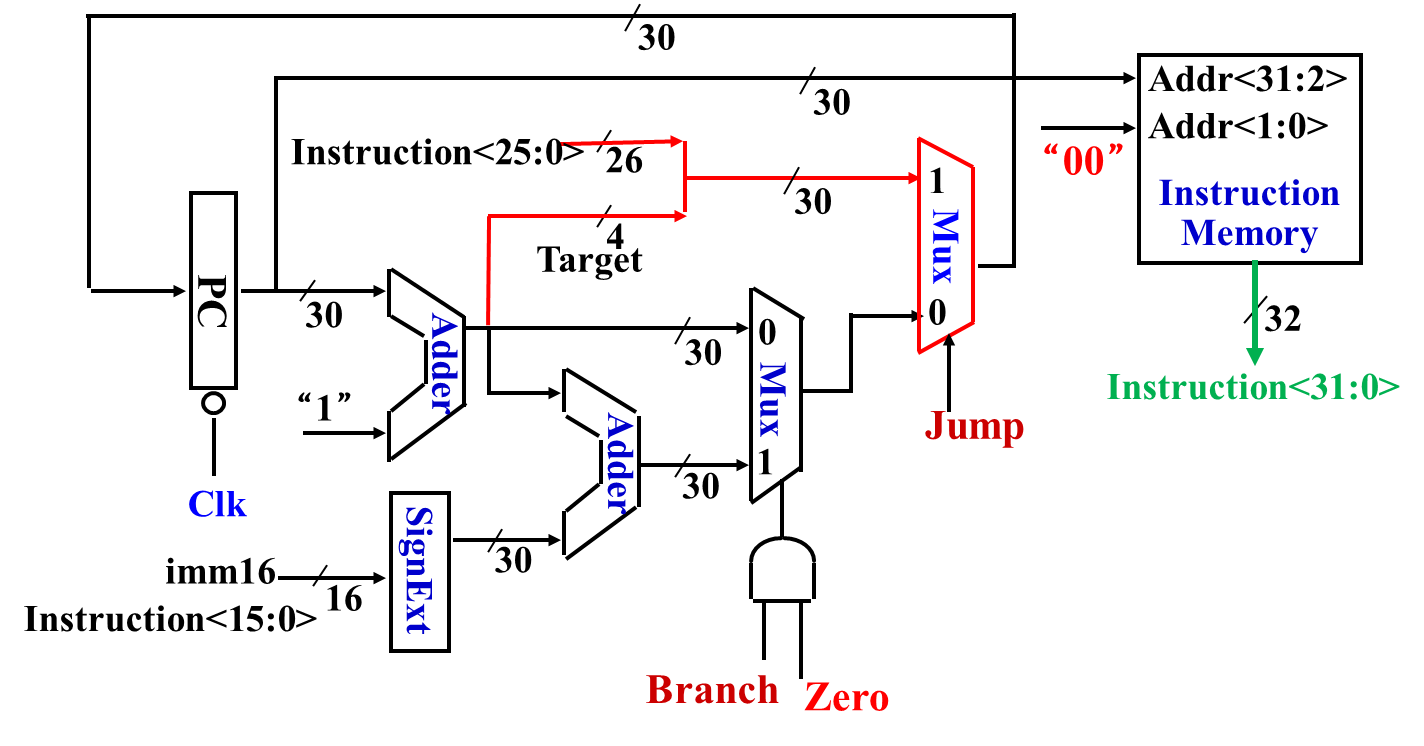
回顾最终数据通路: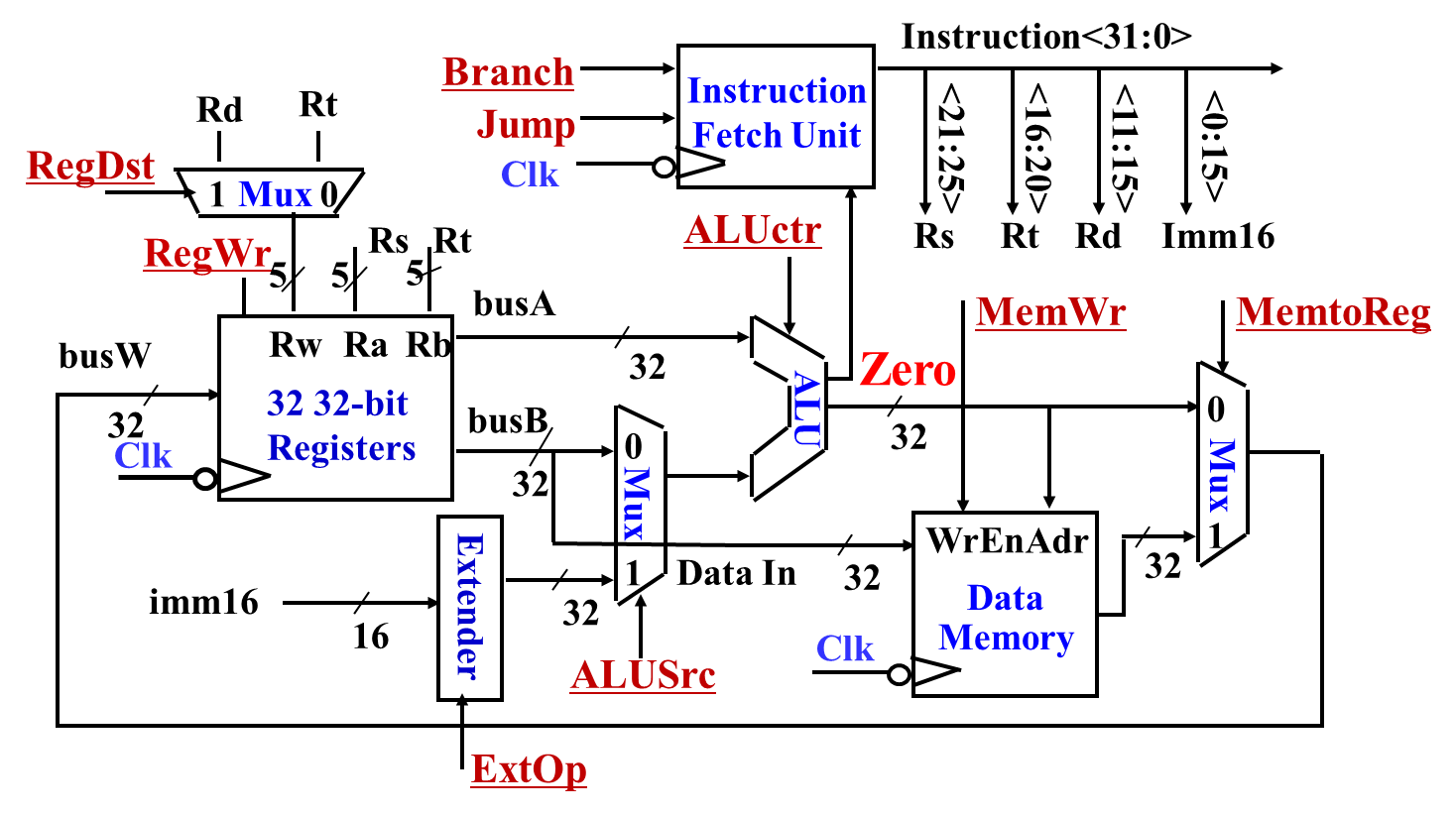
指令数据通路
指令(add/sub rd rs rt) | 数据通路 | 指令延迟 |
|---|---|---|
M[PC] | PC -> InstMem -> Inst -> rs,rt,rd | PC 存在 Clk-to-Q 延迟InstMem 存在 Access Time 延迟 |
R[rd] <- R[rs] op R[rt] | rs,rt,rd -> REGs -> busA,busB -> ALU(add/sub) -> busW -> REGs | ALUctr,RegWr 存在控制逻辑延迟busA,busB 存在 Access Time 延迟busW 存在 ALU 计算延迟 |
PC <- PC + 4 | PC[31,2],1 -> Adder -> PC | Adder 存在计算延迟 |
指令(ori rt rs imm16) | 数据通路 |
|---|---|
M[PC] | PC -> InstMem -> Inst -> rs,rt,imm16 |
R[rt] <- R[rs] op ZeroExt(imm16) | rs -> REGs -> busAimm16 -> ExtenderbusA,Extender -> ALU(or) -> busW -> REGs |
PC <- PC + 4 | PC[31,2],1 -> Adder -> PC |
指令(lw rt rs imm16) | 数据通路 | 指令延迟(最长) |
|---|---|---|
M[PC] | PC -> InstMem -> Inst -> rs,rt,imm16 | PC 存在 Clk-to-Q 延迟InstMem 存在 Access Time 延迟逻辑生成各项控制信号存在延迟 |
Addr <- R[rs] + SignExt(imm16) | rs -> REGs -> busAimm16 -> Extender -> busBbusA,busB -> ALU(add) | busA 存在寄存器 Access Time 延迟busB 存在延迟ALU 计算延迟 |
R[rt] <- M[Addr] | ALU(add) -> DataMem(Read) -> busW -> REGs | DataMem 存在 Access Time 延迟 |
PC <- PC + 4 | PC[31,2],1 -> Adder -> PC | Adder 存在计算延迟 |
指令(sw rt rs imm16) | 数据通路 |
|---|---|
M[PC] | PC -> InstMem -> Inst -> rs,rt,imm16 |
Addr <- R[rs] + SignExt(imm16) | rs -> REGs -> busAimm16 -> ExtenderbusA,Extender -> ALU(add) |
M[Addr] <- R[rt] | ALU(add),busB -> DataMem(Write) |
PC <- PC + 4 | PC[31,2],1 -> Adder -> PC |
指令(beq rt rs imm16) | 数据通路 |
|---|---|
M[PC] | PC -> InstMem -> Inst -> rs,rt,imm16 |
Cond <- R[rs] - R[rt] | rs,rt -> REGs -> busA,busB -> ALU(sub) -> ZR |
if (COND eq 0): | MUX(Branch and ZR) |
PC <- PC + 4 + (SignExt(imm16) * 4) | PC[31:2],1 -> Adder_1imm16 -> SignExtAdder_1,SignExt -> Adder_2 -> PC[31:2] |
else: | |
PC <- PC + 4 | Adder_1 -> PC |
指令(j target) | 数据通路 |
|---|---|
M[PC] | PC -> InstMem -> Inst -> rs,rt,imm16 |
PC[31:2] <- [PC[31:28], target[25:0) | concat(PC[31:28], target[25;0]) -> PC[31:2] |
指令与控制信号逻辑关系
指令与控制信号逻辑关系表:用组合逻辑来实现。
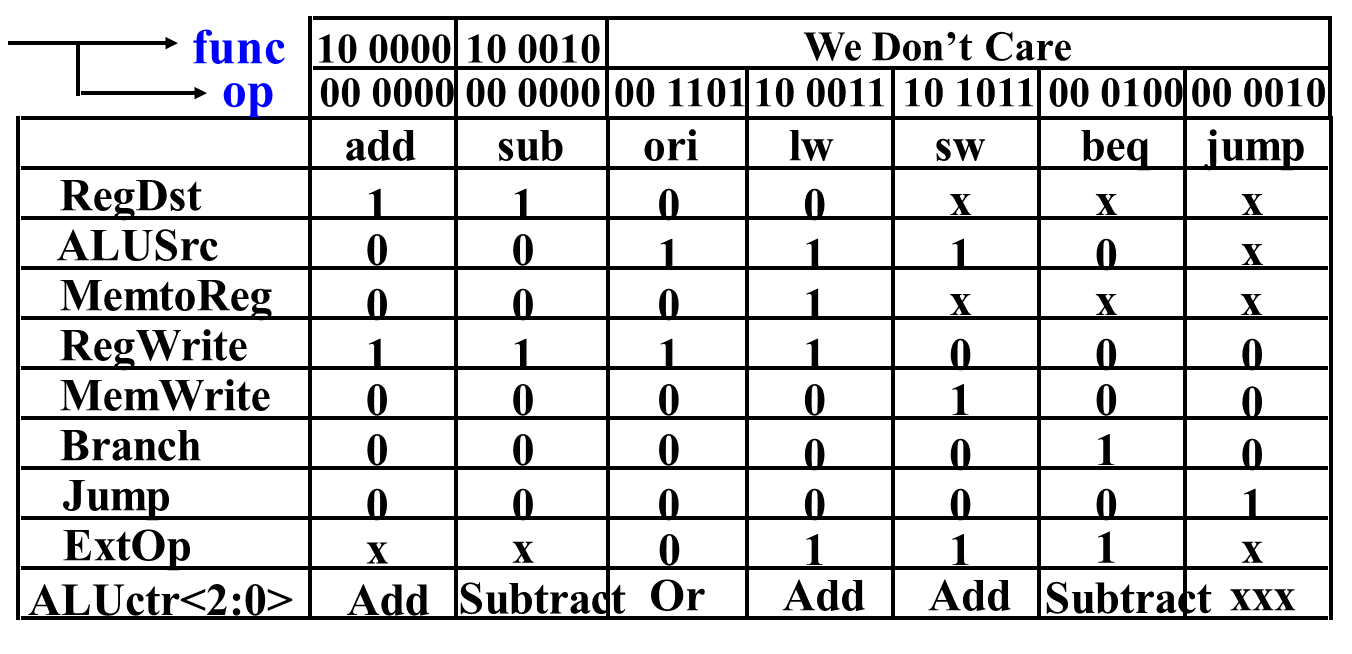
ALUctr 的值的生成逻辑:
op:指令高六位,决定指令类型func:R 型指令最低六位,决定具体操作op -> MainControl -> ALUop:输出中间信号,告诉 ALU 控制器大概要做什么操作func,ALUop -> ALUControl -> ALUctr:最终信号,告诉 ALU 执行什么操作 总转换逻辑表:
总转换逻辑表:ALUctr = f(ALUOp, func[3:0]),用组合逻辑即可。
| 来源指令 | ALUOp | func 字段 | 最终 ALUctr | 运算 |
|---|---|---|---|---|
| R-type | 11 | 由 funct 决定 | 根据 func → 000/001/010/011/111 | add/sub/and/or/slt |
| lw / sw | 00 | 无 | 000 | add(计算地址) |
| beq | 01 | 无 | 001 | sub(比较相等) |
| ori | 10 | 无 | 011 | or(按位或) |
单周期处理器的性能
单周期处理器以最慢的 lw 指令时间作为一个时钟周期。
单周期处理器的 CPI(Clock Cycles Per Instruction,平均每条指令所需时钟周期数)为 1,或者说时钟周期对于所有指令等长。
这样造成许多指令本可以在更短的时间内进行。
4.5 多周期控制器的实现
多周期处理器的特点:
- 时钟周期短
- 不同指令的周期数不同
- 允许同一功能部件在一条指令执行的不同周期中被重复利用
完整数据通路
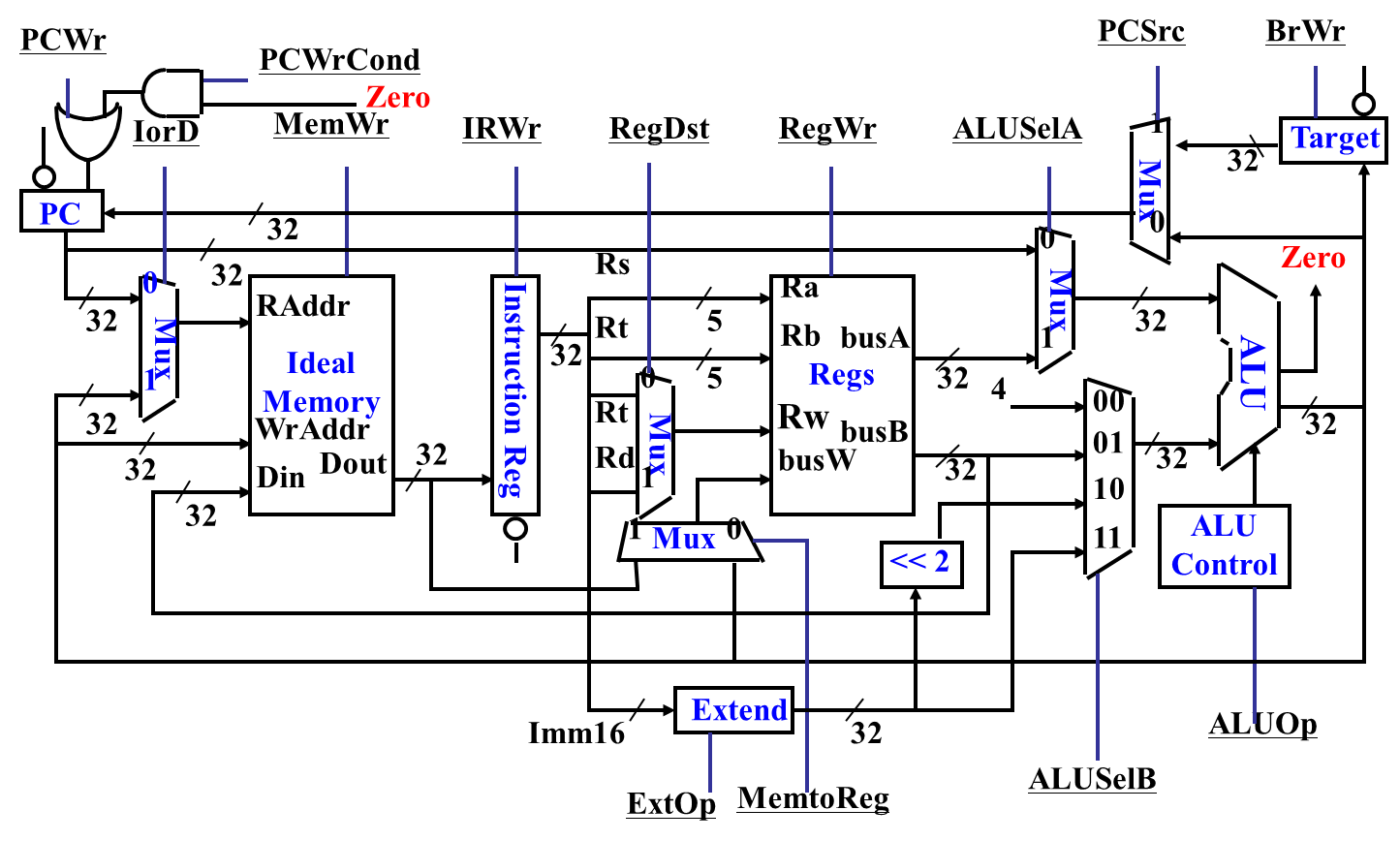
| 控制信号 | 含义(全称) | 控制对象 | 典型取值说明 |
|---|---|---|---|
| PCWr | Program Counter Write | 控制 PC 是否更新 | =1 表示允许写入新地址 |
| PCWrCond | PC Write Conditional | 条件更新 PC(如 beq 时) | 与 Zero 信号配合使用 |
| IorD | Instruction or Data | 选择 Memory 地址来源 | 0→PC(取指),1→ALU 输出(数据访存) |
| MemWr | Memory Write | 控制存储器写操作 | =1 时写入 Din 数据 |
| IRWr | Instruction Register Write | 是否将 Memory 输出写入指令寄存器 IR | 取指周期时=1 |
| RegDst | Register Destination | 选择写回寄存器号 | 0→Rt(I型),1→Rd(R型) |
| RegWr | Register Write | 控制寄存器堆写操作 | =1 时将数据写回寄存器 |
| ALUSelA | ALU Source A Select | ALU 第一个输入选择 | 0→PC,1→寄存器 busA |
| ALUSelB | ALU Source B Select | ALU 第二个输入选择 | 00→busB,01→4,10→立即数扩展,11→扩展后左移两位 |
| ALUOp | ALU Operation | ALU 运算控制信号 | 告诉 ALU Control 执行哪种运算 |
| PCSrc | PC Source | 选择下一条 PC 来源 | 00→ALUResult,01→ALUOut,10→Target(跳转地址) |
| BrWr | Branch Write | 分支目标寄存器是否更新 | 控制 Target 寄存器写入 |
| ExtOp | Extend Operation | 立即数扩展控制 | 0→零扩展,1→符号扩展 |
| MemtoReg | Memory to Register | 选择写回寄存器的数据来源 | 0→ALU结果,1→Memory 输出 |
| Zero | ALU Zero Flag | 来自 ALU 的标志信号 | 结果为 0 时为 1(用于 beq) |
- 指令按多个阶段按顺序执行,上一个阶段输出作为下一个阶段的输入
- 同一阶段的操作可以同时发生
- 每个阶段的结果保存在内部寄存器当中
| 阶段 | 微操作 | 数据通路 |
|---|---|---|
| 1. 取指 | IR <- M[PC]PC <- PC + 4 | [IorD = 0, MemWr = 1] PC -> InstMem.RAddr -> InstMem.Dout[IRWr = 1] InstMem.Dout -> IR[ALUSelA = 0, ALUSelB = 00, ALUOp = add] PC,4 -> ALU[PCWr = 1, PCSrc = 0] (end of cycle) ALU -> PC |
| 2. 译码 | busA <- REGs[rs]busB <- REGs[rt]Decoder <- Op, Func | [IRWr = 0, RegWr = 0] (IR kept) IR -> Rs,Rt -> REGs.Ra,REGS.Rb -> REGS.busA,REGS.busBIR -> Op, Func -> Decoder -> Beq/Rtype/Ori/Memory投机计算: $ALU \leftarrow PC + (SignExt(Imm) « 2)$ [ALUSelA = 0, default] REGS.busA -> ALU[ExtOp = 1, ALUSelB = 10, default] IR -> Imm -> Extend -> <<2 -> ALU[ALUSelA = add, BrWr = 1, default] ALU -> Target |
| 3. 执行 (j) | PC <- [PC[31:28], target[25:0] * 4] | [PCSrc = 10, PCWr = 1] ALUOut, IR -> Target(JumpAddrConcat) -> PC |
| 3. 执行 (beq) | if busA == busB thenPC <- Target | [ALUSelA = 1, AlUSelB = 01, ALUop = sub] busA,busB -> ALU -> ZR投机计算成功: [PCSrc = 1, PCWrCond = 1, ZR determine] Target -> PC |
| 3. 执行 (R-Type) | ALUOutput <- busA op busB | [ALUSelA = 1, AlUSelB = 01, ALUop = RType] busA,busB -> ALU避免竞争: [RegDst = 1, RegWr = 0] Rd -> REGs.Rw 让地址在写使能前先稳定。 |
| 4. 完成 (R-Type) | R[rd] <- ALUOutput | 在 ALU 输出和地址稳定前提下写入:[ALUSelA = 1, AlUSelB = 01, ALUop = RType] [RegDst = 1, RegWr = 1, MemtoReg = 0] ALU -> REGs.busW |
| 3. 执行 (ori) | ALUOutput <- busA or ZeroExt(Imm16) | [ALUSela = 1] busA -> ALU[ExtOp = 0, ALUSelB = 11] Imm -> Extend -> ALU[ALUop = or]避免竞争: [RegDst = 0, RegWr = 0] Rt -> REGs.Rw 让地址在写使能前先稳定。 |
| 4. 完成 (ori) | R[rt] <- ALUOutput | 在 ALU 输出和地址稳定前提下写入:[ALUSelA = 1, AlUSelB = 01, ALUop = or] [RegDst = 0, RegWr = 1, MemtoReg = 0] ALU -> REGs.busW |
| 3. 内存地址计算 (lw/sw) | ALUOutput <- busA + SIgnExt(imm16) | [ALUSelA = 1] busA -> ALU[ExtOp = 1, ALUSelB = 11] Imm -> Extend -> ALU[ALUOp = add, MemWr = 0] ALU -> Mem.WrAddr |
| 4. 存数 (sw) | M[ALUOutput] <- busB | [ALUSelA = 1, ExtOp = 1, ALUSelB = 11, ALUOp = add] 保证 WrAddr 稳定[MemWr = 1] busB -> Mem.Din |
| 4. 取数 (lw) | MDR <- M[ALUOutput] | [IorD = 1] ALU -> Mem.RAddr避免竞争: [RegDst = 1] Rt -> REGs.Rw[MemtoReg = 1] Mem.Dout -> REGs.busW[RegWr = 0] 让地址在写使能前保持稳定 |
| 5. 回写 (lw) | R[rt] <- MDR | [ALUSelA = 1, ExtOp = 1, ALUSelB = 11, ALUOp = add] 保持 ALUOutput 稳定[IorD = x] Memory 空闲[RegDst = 0, MemtoReg = 1]保持地址稳定[RegWr = 1] busW -> R[Rw] 写存 |
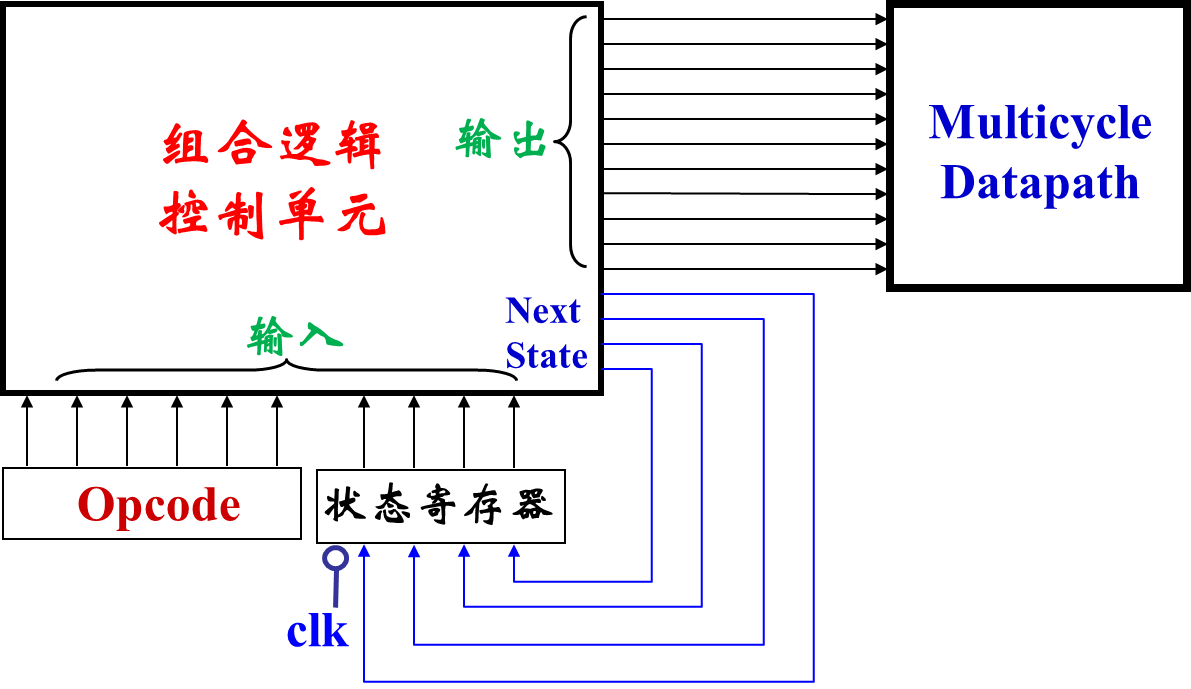
多周期控制器的实现
每个控制信号的取值构成了当前 CPU 的状态,可视作一个节点。状态与状态的转换是图上两个节点的有向边。节点与边构成了 CPU 状态的自动机。
| 方式 | 硬连线控制器 | 微程序控制器 |
|---|---|---|
| 流程 | 1. 画出完整有限状态机 2. 写出下一状态函数 3. 写成布尔方程/真值表 4. 使用 PLA/组合逻辑实现 | 1. 将每个状态写成微指令 2. 使用微程序计数器读取下一条微指令,遇到分治则跳到对应微程序 3. 将跳转关系写成真值表,存在 ROM 里 4. 将 ROM 输出各子段连到数据通路 |
| 优点 | 速度快、成本低、功耗小 | 可编程、可扩展、维护方便 |
| 缺点 | 灵活性差、扩展困难、适合指令系统简单的设计 | 速度较慢、需要一块控制存储 |
时序控制;由时钟、当前状态、操作码确定下一个状态,不同状态输出不同控制信号值。
多周期计算机的性能
$$CPI = \sum_{指令类型} 指令类型出现频率 \times 指令类型所需时钟周期$$每种指令需要的时钟周期数:Load(5), Store(4), R-Type(4), Branch(3), Jump(3)