6.3 磁盘
6.3.2 磁盘的组织结构
磁盘氛围步进电机、传动手臂、读写磁头、磁盘盘片和主轴。
- 步进电机控制读写磁头定位到每个磁道
- 主轴将磁盘盘片固定
- 在电动马达的驱动下,磁盘盘片高速转动。
6.3.3 磁盘的工作原理
磁盘的组织:
- 磁道:每个同心圆是一个磁道
- 扇区:每个磁道分为等长圆弧
- 柱面:多个盘面上等半径的磁道的组合。
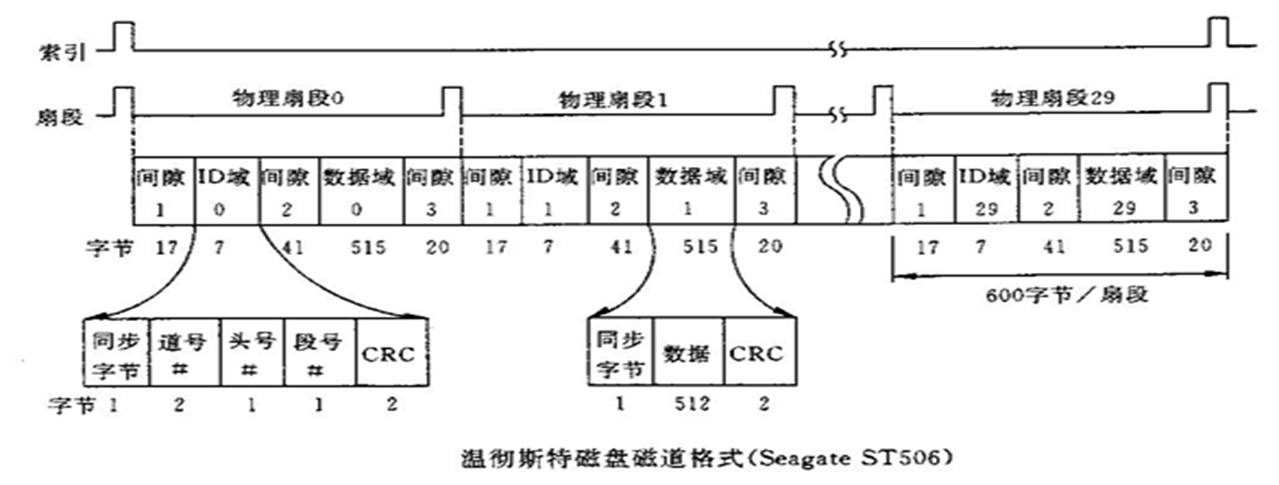
扇区之间留有空隙的原因:
- 区分不同信息区
- 为各种操作提供缓冲时间
- 增强鲁棒性
读写磁头:实现 电脉冲信号 和 介质磁化 状态的转换。
磁盘盘片:含有一层磁性材料区,其磁化方向代表着二进制信息。
磁盘基本操作:
- 数据写入:通过读写磁头将电脉冲信号改变盘片上的磁性粒子簇的极性
- 数据读取:通过读写磁头,盘片上的磁性粒子簇和读写磁头的磁感应物质相互作用,产生感应电压,转换为二进制信号。
6.3.4 磁盘的指标性能
记录密度:
- 道密度:单位半径有多少个磁道,tpm / tpi
- 位密度:单位长度磁道能记录的二进制位数,bpm / bpi,通常指内圈磁道的位密度。越往外位密度越低,外圈出错概率低,常用于记录系统重要信息。
- 面密度:单位面积记录的二进制位数,$bpm^2 / bpi^2$,$面密度 = 道密度 \times 位密度$
增大记录密度的方法:
- 提高道密度:增加磁道数目
- 增加位密度:增加总扇区数,现代磁盘中内道和外道的位密度相同,外区扇区数比内区扇区数多,可以提高平均位密度。
磁盘容量:能记录的二进制信息总量。
- 格式化容量:格式化后能记录的信息量
- 非格式化容量:完全从记录密度考虑的信息量
- 格式化容量的比例大概为 $0.7 \sim 0.9$.
存取时间:$t_a = t_S + t_W + t_{WR}$
- 寻道时间 $t_S$:磁头要从当前磁道转移到目的磁道
- 旋转等待时间 $t_W$:磁头要等待盘面旋转使得目标扇区移动到磁头处 最大旋转延迟 $t_{max\ rotation} = 1 / v_{磁盘转速}$ 平均旋转延迟 $t_{avg rotation} = \frac{1}{2} t_{max\ rotation}$
- 数据传输时时间 $t_{WR}$:完成读写操作。
- 存取时间主要来自寻道时间和旋转延迟。
误码率:读数据出错位数占总位数的比例
- 软错误:读写的随机错误,偶然性错误,概率 $< 10^{-9}$
- 硬错误:磁盘上的永久错误,概率 $< 10^{-12}$
6.4 闪存存储器 (Flash Memory)
闪存的特点和优势:
- 电可擦写、可编程、只读、非易失性存储器 $E^2PROM$,速度比 DRAM 慢
- 尺寸小、功耗低、抗震好,访问延迟是磁盘的 $1 \perthousand \sim 1 %$
- 成本低 $< ¥1 / GB$
闪存分类:
| 类型 | NOR Flash | NAND Flash |
|---|---|---|
| 访问 | 随机访问,按字节访问 | 块级IO访问 |
| 读写 | 随机读较快 | 擦除和写更快 |
| 应用 | 存储程序代码 | 存储数据较快 |
单元电路结构:由一个带浮栅的晶体管构成,有电荷则导电表示 $0$,无电荷则不导电表示 $1$.
工作原理:
- 读:加正电压,检测到电流表示 $0$,检测不到电流表示 $1$
- 写:编程则写入 $0$.
- 擦除:整块写入 $1$.
- 反复擦写后,电子会泄露,从而无法区分二进制状态
特殊问题:
- page 是最小写入单位,block 是最小擦除单位
- 数据更新不能在原位置进行,只能将新数据写入空闲页
- 需要进行进一步的存储管理:地址映射、垃圾回收、损耗均衡。
6.6 并行 IO:RAID 盘阵
廉价磁盘冗余阵列(RAID):将多个廉价磁盘按照某种方式组织成一个磁盘阵列,以提高存储容量,读写速度,可靠性。
6.7 IO 控制方式
无条件传送方式
描述:无需判断 IO 设备状态,直接传送数据。
特点:
- 只需一条 IO 指令
- 只有一个数据缓冲寄存器
- 在动作时间 固定、已知 的条件下使用
- 对 CPU 干扰大,效率低,很少使用
程序查询方式(I/O Polling)
描述:IO 设备将自己的状态放到状态寄存器中,系统 主动查询 状态寄存器的特定状态来决定下一步的动作。
特点:
- IO 操作完全处于 CPU 的指令控制下
- 数据传递在 CPU 的寄存器和外设的数据缓冲寄存器之中进行,IO 不直接访问内存
- 在 CPU 查询到的状态满足条件的时候,才执行本次传送。
- 效率低,速度慢,CPU 需要等待外设完成,不适合高速外设数据传送
- CPU 和外设不能并行工作
- 工作方式是完全串行或部分串行
接口:
- 数据缓冲寄存器 (Data Buffer Register, DBR)
- 程序状态与控制寄存器 (Status and Control Register, SCR):寄存发送给外设的命令,以及外设的状态信息
- 设备地址译码器:用于识别外设
程序中断方式(I/O Interrupt)
描述:当 IO 设备需要 CPU 干预时,通过中断请求通知 CPU。然后 CPU 终止当前程序的执行,跳到中断处理程序来执行。最后返回到被终止的程序继续执行。
CPU 响应中断:
- 保护断点和程序状态
- 识别异常事件
- 切换到异常处理程序执行
- 回到被终止的程序继续执行
中断控制器的功能:为了解决多个外设同时请求中断的问题,需要一个中间层的硬件来记录请求、决定是否响应、决定优先级、告诉 CPU 要跳到哪里。
中断请求的处理:
- 外设产生中断请求,放在中断请求寄存器(Interrupt Request Register, IRR)
- CPU 设置屏蔽寄存器(Interrupt Mask Register, IMR)
- 多个有效中断同时存在时,判优电路选择当前优先级最高的一个
- 生成中断向量,并通过 INTR 控制信号线发出中断请求
- CPU 在每条指令的最后一个时刻检查 INTR,若有效则执行响应中断的流程。
中断过程的两个阶段:
- 中断响应(由硬件完成):CPU 在每条指令的最后一个时刻检查未屏蔽的中断请求,然后关中断、保存现场、跳转到中断服务程序入口
- 中断处理(由软件完成):执行中断服务程序,由操作系统和驱动程序决定
多重中断:当执行中断服务程序过程中,又有新的中断请求产生,并且新中断优先级高于正在执行的中断,则要终止现在的程序转而处理新的中断。这要用 堆栈 来实现。
两种响应优先级:
- 中断响应优先级:多个中断同时出现时,CPU 选择处理哪个中断
- 中断处理优先级:CPU 在执行中断服务程序的时候,允许那些更加优先的中断再次打断当前的处理
特点:
- 可以提高主机的效率,不必一直等待外设完成
- CPU 和外设可以部分地并行工作
- 对 IO 请求响应慢,需要等待外设的中断请求,增加了许多中断响应和中断处理
- 数据传送速度慢,由软件完成,可能造成数据丢失
直接存储器访问方式 (Direct Memory Access, DMA)
描述:
- 这是磁盘等高速外设特有的 IO 方式
- 磁盘和主存进行数据交换的时候,需要专门的 DMA 控制器控制总线,完成数据传送
- 外设准备好数据之后,向 DMA 控制器发送 DMA 请求信号,DMA 向 CPU 发送总线请求,申请总线使用权,然后由 DMA 控制器控制总线进行传输。
- DMA 控制器的总线使用权优先级比 CPU 高
- DMA 传送前需要通过"中断"告知 CPU,传送后通过DMA结束中断告知CPU
DMA 的工作方式:
- CPU 停止法:FMA传输期间,CPU 完全暂停对总线的访问。
特点:
- 适用于高速设备如磁盘、光盘等
- 适用于成批数据交换,并且单位数据间的时间间隔较短