重点内容:
存储基本概念(易失性、是否刷新、器件类型)
字扩展/位扩展及其连线
程序的局部性分析
Cache 总容量计算(涉及valid/dirty/tag/LRU位的考虑)
Cache 性能公式
三种映射方式具体分析
Cache 块长与效率关系分析
缺失类型分析
Cache 的写策略、替换策略
页表结构
页表/TLB 完整访存链路
3种hit/miss及其组合的分析
3.1 存储器概述
分类、性能指标、多层次
3.1.1 存储器的分类
$$\bigstar \mathbf{IMPORTANT}\bigstar$$
| 分类标准 | 名称 | 说明 |
|---|---|---|
| 在计算机中的作用 | 主存储器 / 主存 / 内存 | 存放所需的程序和数据 CPU 可随机访问,可与 Cache/辅存 交换数据 容量小,速度快,价格高 |
| 辅助存储器 / 辅存 / 外存 | 存放暂时不用的程序和数据,永久性信息 需要调入主存后才能被 CPU 访问 容量大、速度慢、成本低 | |
| 高速缓冲存储器 / Cache | 存放 CPU 经常使用的指令和数据 CPU 能高速访问它们 容量小、价格高,制作在 CPU 中 | |
| 存取方式分类 | 随机存储器 / RAM | 每个存储单元可以随机存储 读写方便、使用灵活 用作主存或 Cache 分为静态 RAM(SRAM)和动态 RAM(DRAM) |
| 只读存储器 / ROM | 可随机读,(不能写入或写入很慢) 信息写入则固定不变,断电不消失 存放固定不变的程序、常数、字库 可作为主存的一部分 广义上仍然保留断电保留、随机读取、写比读要慢得多 | |
| 串行访问存储器 | 读写需要按照物理位置先后寻址 如顺序存取存储器(磁带,存取速度慢)、 直接存取存储器(磁盘、光盘,速度介于顺序存取存储器和随机存取存储器之间) | |
| 存储介质分类 | 磁表面存储器 | 如磁带、磁盘 |
| 磁芯存储器 | ||
| 半导体存储器 | 如MOS 型存储器、双极型存储器 包括 SRAM,DRAM | |
| 光存储器 | 如光盘 | |
| 可保存性分类 | 易失性存储器 | 断电后存储信息消失 如 RAM |
| 非易失性存储器 | 断电后存储信息仍然保持 如 ROM、磁表面存储器、光存储器 若破坏性读出,则每次读出之后需要紧接一个再生操作 |
3.1.2 存储器的性能指标
存储容量:$存储容量 = 存储字数 \times 字长$,其中字数表示存储单元空间大小,字长表示一次存取的数据量
单位成本:$每位价格 = 总成本 / 总容量$
存取速度:$数据传输率(存取带宽) = 数据宽度 / 存储周期$
存取周期 $T_m$ 包括存取时间 $T_n$ 和恢复时间 $T_r$
$T_m(存取周期) = T_n(存取时间) + T_r(恢复时间)$

3.1.3 多层次存储系统
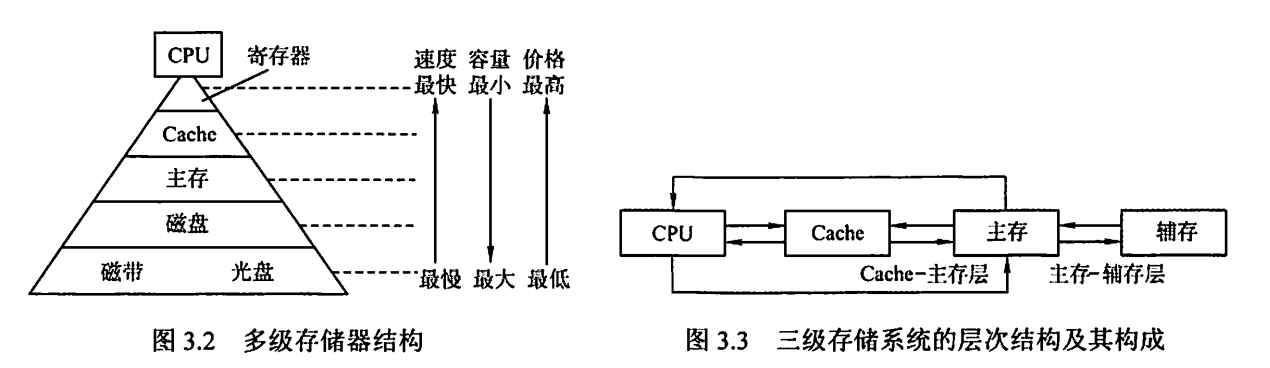
存储层次结构的高效性,依赖于程序的局部性原理。
- 在 CPU–主存层,Cache 机制通过保存热点数据,加速存取速度,使其接近 Cache,容量和价格接近于主存。这里面的数据调动是硬件自动完成的,对所有程序员都是透明的。
- 在 主存–辅存层,虚拟存储的页式管理通过页面调度,使存取速度接近于主存,扩大容量和价格接近于辅存。这里面的数据调动是硬件和操作系统共同完成,对应用程序员透明。
- 在逻辑上,Cache 中的数据一定来自主存,主存中的数据一定来自辅存。
3.2 主存储器
SRAM、DRAM、RAM、主存
3.2.1 SRAM 和 DRAM
SRAM 的存储元是双稳态触发器(六晶体管 MOS),读出是非破坏性的,不需要再生。
SRAM 存储速度快、集成度低、功耗大、价格昂贵,多用于 Cache。
DRAM 的存储元是晶体管,用栅极电容上的电荷来存储信息,需要定期刷新。
DRAM 容易集成,价格低,容量大,功耗低,存取速度比 SRAM 慢,多用于主存。 $$\bigstar \mathbf{IMPORTANT}\bigstar$$ DRAM 电容上的电荷需要隔一段时间刷新,通常取 刷新周期 $2ms$:
- 集中刷新:一个刷新周期内,利用一段固定的时间(死时间),对所有行逐一再生,停止读写操作。缺点是有死时间。
- 分散刷新:每个工作周期前半部分读写/保持,后半部分用于刷新。这样增加了系统的存取周期。缺点是访存变慢。
- 异步刷新:按照 $t = 2ms / R(行数)$ 定期发刷新请求,让系统找机会刷新。效果最好。
DRAM 刷新的特点:
- 刷新对 CPU 是透明的
- 刷新单位是行,让 DRAM 内部自行生成行地址(一次行选通信号)
- 刷新操作类似于读操作,而又不同
- 刷新操作时,所有芯片对应的行并行更新,无需选片。
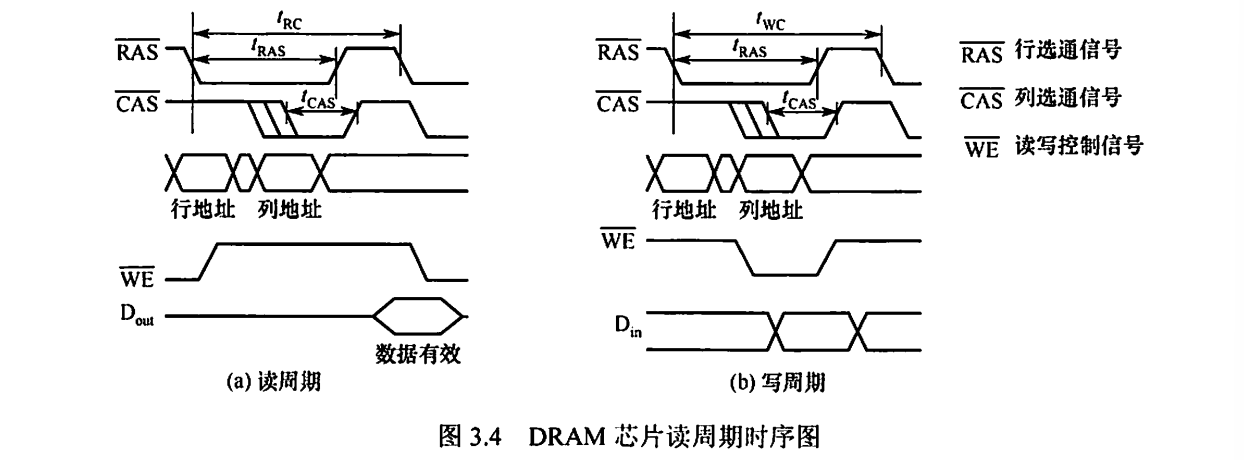
| 项目 | 读周期 | 写周期 |
|---|---|---|
| WE | 高 | 低 |
| 行地址 | RAS 有效前送 | 同 |
| 列地址 | CAS 有效前送 | 同 |
| 数据方向 | 芯片 → 外部 | 外部 → 芯片 |
| 数据要求 | 等待有效窗口采样 | CAS 前必须稳定 |
| 周期参数 | tRC | tWC |

存储器芯片的构成:存储体矩阵(二维)、行选择线、列选择线、地址译码器(二进制转行/列选择)、片选控制信号、读写控制信号
3.2.2 只读存储器
ROM 的特点:
- 结构简单,位密度比 RAM 高;
- 非易失性,可靠性高。
ROM 的类型:
- 掩模式只读存储器(MROM):生产芯片时写入内容,之后无法修改 可靠性高、集成度高、价格便宜、灵活性差
- 一次可编程只读存储器(PROM):允许用户通过专门设备写入程序,之后无法修改
- 可擦除可编程只读存储器(EPROM):允许用户通过专门设备写入程序,可以多次改写,不过编程次数优先。
- Flash 存储器:可以在线进行快速擦除和重写
- 固态硬盘(SSD):使用固态电子存储芯片阵列制成的硬盘,可以长期保存信息、快速擦除和重写。
3.2.3 主存的基本组成
存储体矩阵、地址寄存器、地址译码器、读写控制电路
3.2.4 多模块存储器
单体多字存储器:每个存储单元存储 $m$ 个字,一次并行取出 $m$ 个字,地址是顺序排列的。 对于连续地址取指的情形下,存取周期缩短。
多体并行存储器:多块芯片组合在一起。
- 高位交叉编址:高位地址是体号,低位地址是体内地址。这样访问连续地址时,会总是在同一个体内访问,无法提高吞吐率。
- 低位交叉编址:高位地址是体内地址,低位地址是体号。这样访问连续地址是,将会可以采用流水线的方式进行存取,提高存储器带宽。
- 交叉存取度的条件是 $m \ge \frac{T_m}{r}$,其中 $m$ 模块数,$r$ 是总线传送周期(两次访存最小时间间隔)。
- 连续读 $m$ 个字,所需时间为 $t = T + (m - 1)r$,而改进前的时间为 $t_0 = Tm$。因此能有效提高存储器带宽。 平均每个字存取时间为 $t / m \approx r$(当 $m$ 充分大时),因此整体来说,每个总线周期 $r$ 能给 CPU 提供一个字。
3.3 主存储器与 CPU 的连接
原理、容量扩展、地址分配
3.3.1 连接与原理
三条总线:
- 主存通过地址总线、数据总线、控制总线和 CPU 连接
- 地址总线:
A0, A1, ..., A(n - 1)- 方向:从 CPU 到存储器
- 位数决定了可寻址最大内存空间
- 数据总线:
D0, D1, ..., D(m - 1)- 方向:双向
- $数据传输率\propto 数据总线位数 \times工作频率$
- 控制总线:
- 访存控制类:
RD, WR读信号和写信号OE输出使能,WE写使能,CS片选信号
- 地址选通类:(只在 DRAM 中出现)
RAS行地址选通,CAS列地址选通- 经常替代
CS
- CPU 状态/总线仲裁类:
CLK, RESET, READY/WAIT, HOLD, HLDA - 中断与异常类:
INT/INTR, NMI, INTA - 指出了总线周期的类型和读写完成的时刻。
- 访存控制类:
3.3.2~3.3.4 主存容量的扩展
$$\bigstar \mathbf{IMPORTANT}\bigstar$$
| 存储容量扩展类型 | 特点 | 引脚连接 |
|---|---|---|
| 位扩展 $mk \times n \to mk \times N$ | 字数不变,位数扩展 需要 $\lceil N/n\rceil$ 片芯片 | 地址端、CS、WE 分别并接(同时读/写) 数据读写端:单独引出(不同的位置) |
| 字扩展 $mk\times n \to Mk\times n$ | 字数扩展,位数不变 需要 $\lceil M/m\rceil$ 片芯片 | 地址端(对应实际的低位地址码)、WE、数据读写端分别并接 CS:和高位地址码的译码结果连接 |
| 字位同时扩展 $mk\times n \to Mk\times N$ | both 需要 $\lceil N/n\rceil\lceil M/m\rceil$ 片芯片 | 地址端(对应实际的低位地址码)、WE 分别并接 CS:和高位地址码的译码结果连接,同一行并接同一个译码结果 数据读写端:同一列并接到同一位 |
- 字扩展时,同一个芯片里面的高地址是相同的,低地址从全 $0$ 到全 $1$。
- 片选可以用线选法或者译码片选法。
3.4 *外部存储器
磁盘、固态硬盘
3.5 高速缓冲存储器
局部性原理、Cache 工作原理、映射方式、替换算法、写策略
3.5.1 程序访问的局部性原理
$$\bigstar \mathbf{IMPORTANT}\bigstar$$
- 时间局部性:最近未来用到的信息很有可能是现在用到的信息(如循环)
- 空间局部性:最近未来用到的信息通常和现在使用的信息在存储空间上是临近的(如指令的顺序存取)
3.5.2 Cache 的基本工作原理
Cache 的读音 /kæʃ/.
Cache 通常由 SRAM 构成。 Cache 和主存都被划分为相等的块,块的长度称为块长,也是 Cache 一行的长度。 Cache 仅保存主存中最活跃的若干块的副本。 $$\bigstar \mathbf{IMPORTANT}\bigstar$$ 一次访存工作流程:
- CPU 发出访存地址:产生主存地址(块号 Block Number+ 块内地址 Offset)
- 映射 Cache 地址:“Cache 地址映射变换机构”会将主存块号按照映射方式转换为 Cache 块号,从而得到 Cache 地址(Cache 块号 + 块内地址 Offset)
- 命中判断:判断该主存块是否在 Cache 里
- 命中:Cache 直接将对应数据通过数据总线传到 CPU
- 不命中:
- 主存将整个块读出来,然后考虑装到 Cache 中
- 要判断对应位置是否有空闲块,如果没有则需要通过替换策略淘汰其中一块,再装到 Cache 中。
- 再从 Cache 将对应数据通过数据总线传到 CPU
在命中判断的时候,可能会遇到 Cache 和主存内容不一致的情况,需要一定的写策略处理。 $$\bigstar \mathbf{IMPORTANT}\bigstar$$ Cache 的命中率:$H = \displaystyle \frac{N_c}{N_c + N_m}$
Cache-主存系统平均访问时间:
- 设 Cache 和主存同时被访问:$T_a = Ht_{cache} + (1 - H)t_{memory}$
- 若 Cache miss 后才访问主存:$T_a = t_{cache} + (1 - H) t_{memory}$
3.5.3 Cache 和主存的映射方式
$$\bigstar \mathbf{IMPORTANT}\bigstar$$ 直接映射:$\text{Cache 行号} = \text{主存块号} \bmod \text{Cache 总行数}$,
- 每个主存块对应唯一一个 Cache 中的位置,它的块冲突率最高,空间利用率最低。
- 假设 Cache 有 $2^c$ 行,主存有 $2^m$ 块
- 主存地址的低 $c$ 位就是对应 Cache 行号
- 主存地址的高 $t = m - c$ 位需要写入对应 Cache 行的标记(tag)
- 直接映射的地址结构为:

- 命中条件:Cache 对应行非空,且标记与当前主存地址一致,且有效位为 $1$
全相联映射:每一块可以装入 Cache 中任意位置
- 访存是需要与所有 Cache 行的标记进行比较。冲突概率最低,空间利用率高,命中率高,查找速度较慢,成本高。
- 全相联映射的地址结构为

组相联映射:将 Cache 分成 $Q$ 个大小相等的组,每个主存块对应唯一固定组的任意一行,即组间用直接映射,组内用全相联映射,是一种折中办法。
- 先得出组号 $\text{Cache 组号} = \text{主存块号} \bmod \text{Cache 组数(Q)}$
- 然后将对应 Cache 的每行的标记和主存的高位标记进行比较
- 如果有相等且有效位为 $1$,则命中
- 组相联映射的地址结构为:

Cache 中每一行需要有 tag 字段。
Cache 总容量等于数据容量加标记阵列容量(有效位 + tag)
$$\bigstar \mathbf{IMPORTANT}\bigstar$$
行的大小与命中率的关系:
- 行的长度较大,可以充分利用空间局部性,增加命中机会
- 行的长度过大,未命中时从主存读块需要更长时间,同时 Cache 项数变少,命中可能性变小。 $$\bigstar \mathbf{IMPORTANT}\bigstar$$ Cache 失效类型:
- 强制失效:首次访问某个数据块时导致 Cache 失效。
- 容量失效:Cache 不能存放程序运行所需的所有块,需要不断替换。
- 冲突失效:直接映射和组相联映射中,多块内存数据映射到 Cache 的同一个位置
3.5.4 Cache 中主存块的替换算法
在全相联和组相联映射中,当新块所在的组已经占满时,需要用到替换算法。 $$\bigstar \mathbf{IMPORTANT}\bigstar$$ 随机算法:随机替换其中一个 Cache 块,但是未用到程序访问局部性原理,因此命中率较低
先进先出算法:选择最早调入的行进行替换,但是未用到程序访问局部性原理,因为最早调入的行也可能是经常要用的。
近期最少使用算法(LRU):选择近期长久非访问过的 Cache 行作为替换的行
- 对每个 Cache 行设置一个计数器,位数是 $\log_2\text{组相联数}$
- 刚刚命中/存入Cache的行的计数器为零,计数器越大则说明越少使用。
- 命中时,所命中的行的计数器清零,数值比它低的计数器加一,比它大的不变。
- 不命中且还有空闲行时,装入新的行并计数器清零,其余全部加一
- 不命中且没有空闲行时,选择计数器最大的行装入新的行并计数器清零,其余全部加一
- 抖动:当集中访问的存储器超过组相联数,则命中率会变得很低。
最不经常使用算法:将一段时间内被访问次数最少的存储行换出
- 此时,计数器存储的是访问次数,每访问一次加一。
3.5.5 Cache 写策略
当对 Cache 中的内容进行更新的时候,需要选用写操作策略使得 Cache 内容和主存内容保持一致。 $$\bigstar \mathbf{IMPORTANT}\bigstar$$ Cache 写命中(hit)的处理办法:
- 全写法 / 写直通法 / Write Through:
- 把数据同时写入 Cache 和主存,那么替换 Cache 行时就不需要写回主存了
- 优点:能随时保持主存的正确性;缺点:增加访存次数,降低 Cache 效率。
- 写缓冲 / Write Buffer:在 Cache 和主存之间加一个写缓冲。
- 写数据时,CPU 将数据同时写入 Cache 和写缓冲,然后写缓冲再将内容写入主存。
- 写缓冲是一个队列。
- 写缓冲可以解决速度不匹配的问题。
- 回写法 / 写回法 / Write Back:
- 只把数据写入 Cache 而不立即写入主存,替换 Cache 行时才写回主存
- 优点:减少了访存次数;缺点:存在主存与 Cache 不一致的隐患
- 修改位(脏位):每个 Cache 行设置修改位,替换时检查该修改位。 若修改位为 $1$ 则说明被修改过,需要写回主存,否则无需写回主存
Cache 写不命中(miss)的处理办法:
- 写分配法 / Write Allocate:
- 加载主存中的块到 Cache 中,然后更新这个 Cache 块。
- 尝试利用程序的空间局部性,但是缺点是不命中的花销较大
- 由于产生了脏块,且认为接下来频繁会修改写过的块,所以一般和回写法合用
- 非写分配法 / Not Write Allocate:
- 只写入主存,不进行调块。
- 由于不产生脏块,认为写过的块不会频繁命中,因此一般和全写法合用
分离 Cache 和多级 Cache:
- 将指令 Cache 和数据 Cache 分开设计,避免指令和数据竞争同一个 Cache
- 可以同时利用指令的时间局部性和数据的空间局部性。
- 指令和数据分离一般在 L1 Cache 中
- 在两级 Cache 中,L1 Cache 对 L2 Cache 通常用全写法+非写分配法,L2 Cache 对主存用回写法+写分配法。
3.6 虚拟存储器
页式、段式、段页式
3.6.1 虚拟存储器的基本概念
虚拟存储器将主存或辅存的地址空间统一编址。
- 虚地址 / 逻辑地址:用户编程允许涉及的地址,形成虚拟空间/程序空间。 虚地址 = 虚存页号 + 页内字地址
- 实地址 / 物理地址:实际主存单元地址,对应主存地址空间/实地址空间。 实地址 = 主存页号 + 页内字地址
- 虚地址比实地址要大得多。
CPU 访问虚地址的流程:
- CPU 使用虚地址时,先判断该虚地址对应的单元内容是否已经装入主存
- 如果在主存中,就可以直接访问主存,否则需要将所在的页调入主存后再由 CPU 访问。
- 如果主存已满,需要需用替换算法置换其中一页。
虚拟存储机制:
- 全相联映射:因为缺页调用辅存的代价很大,所以需要提高命中率。
- 写回法 + 写分配法:尽量避免缺页调用。
3.6.2 页式虚拟存储器
3.6.2.1 页表
$$\bigstar \mathbf{IMPORTANT}\bigstar$$ 虚拟空间和主存空间都分成同样大小的页。
- 实页/页框:主存的页
- 虚页:虚存的页
- 页表:放在主存中的虚页号和实页号的对照表,记录虚页调入主存中安排在主存中的位置
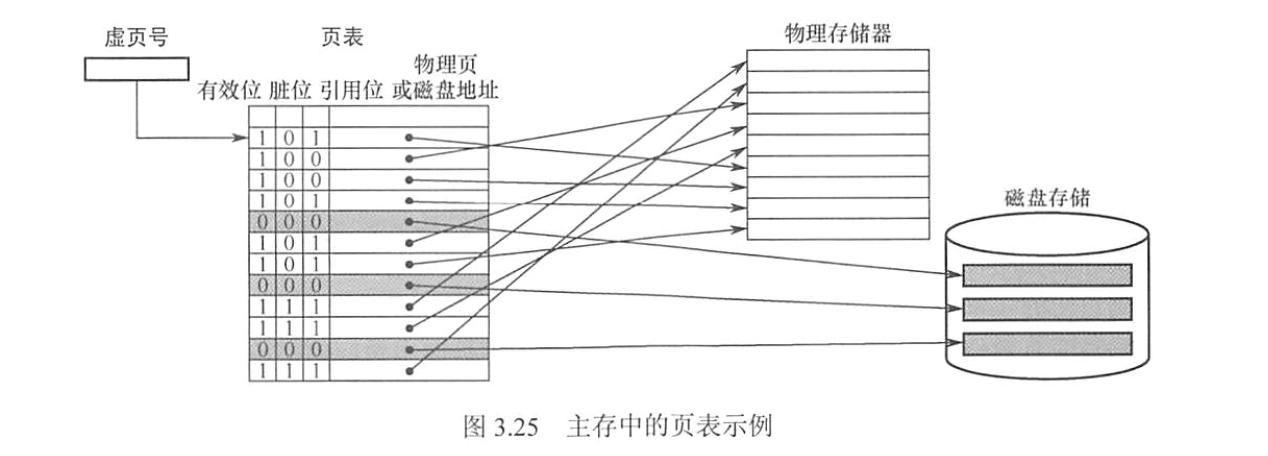
- 有效位 / Valid:是否已经调入主存
- 脏位/修改位 / Dirty:页面是否被修改过,在替换时用于判断是否需要写回磁盘
- 引用位/使用位 Ref/Acc:配合替换策略,一般表示最近是否被使用过。
地址转换的流程:
- 将虚拟地址写成虚拟页号+页内地址的形式
- 从页表基址寄存器得到页表基地址,与虚拟页号相加找到对应的页表项
- 检查对应 Valid 是否为 $1$
- 如果是那么物理页号+页内地址得到物理地址
- 如果不是,则需要进行缺页处理
页式虚拟存储器的特点:
- 优点:页面长度固定,调入方便
- 缺点:实际程序可能不是页面整数倍,造成头尾的页面调入浪费。
页面大小:
- 页面太小:使得页表过大,并且不能充分利用空间局部性,命中率会变低
- 页面太大:减少页表空间,但是会浪费过多存储时间,页面调入/调出的时间较长。
3.6.2.2 快表(TLB)
采用虚拟存储机制后,需要查页表(也是访问主存),所以访问主存的次数变多了。
根据程序执行的局部性原理,当经常访问某些页时,可以将这些页表项放在 高速缓冲器组成的快表(TLB) 中,这样可以明显提高效率。对应在主存中的页表称为慢表。 $$\bigstar \mathbf{IMPORTANT}\bigstar$$ 快表的存储机制:
- 采用全相联或组相联形式
- 每个 TLB 项有表项内容加上 TLB 标记字段组成
- TLB 标记字段:表示该表项取自哪个虚页号对应的页表项
- 全相联:Tag = 虚页号
- 组相联:Tag = 虚页号的高位部分,组号 = 虚页号的低位部分
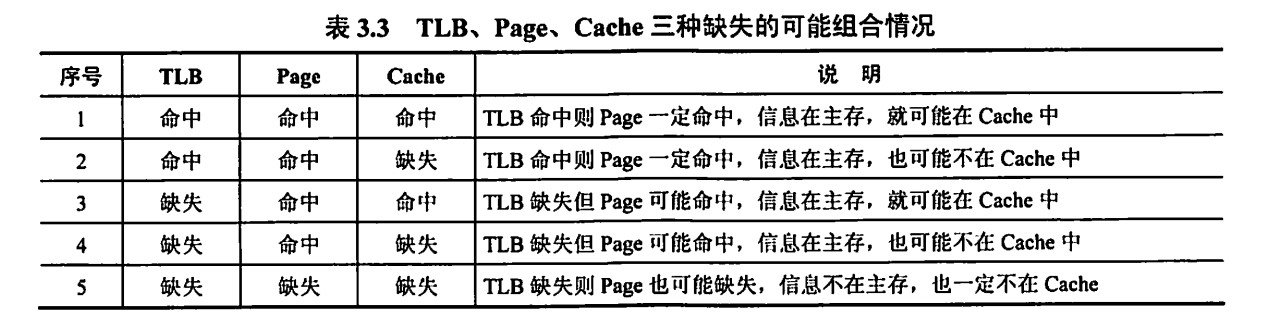
3.6.2.3 具有 TLB 和 Cache 的多级存储系统
$$\bigstar \mathbf{IMPORTANT}\bigstar$$ CPU 访存的全部流程:
- CPU 给出虚拟地址 = (高位)虚页号 + (低位)页内地址
- 依照具体相联方式,在 TLB 中寻找是否有对应页表项
- 全相联:利用硬件电路快速和每个页表项比较,看是否 Tag = 虚页号且 Valid = 1
- 组相联:先通过虚页号低位部分找到对应的组,然后在组内逐个和每个页表项比较,看是否 Tag = 虚页号高位部分且 Valid = 1
- 若 TLB Catch,则(Page Catch)可以直接转换为物理地址 = (高位)实页号 + (低位)页内地址
- 若 TLB Miss,则需要访问主存的页表
- 【TLB miss 后访问主存页表】由虚拟页号对应的页表项,检查对应 Valid 是否为 $1$
- Page Catch,那么物理页号+页内地址进行索引得到物理地址
- Page Miss,则(Cache Miss)需要进行缺页异常处理,将外存的整块页加载到主存中,需要替换策略
- 【Page Catch 后访问主存】Cache 机构根据主存映射规则找到对应的 Cache 行/组,并将对应行的标记逐个和物理地址的 Tag 进行比较
- Cache Catch:若找到 Tag 相等且 Valid 为 $1$,那么取出 Cache 对应的字送 CPU
- Cache Miss:若找不到,则需要访问主存中的对应位置,并装载到 Cache 中,需要替换策略
3.6.3 段式虚拟存储器
每个段是按照程序的逻辑结构划分,长度因程序而异。
- 虚拟地址 = 段号 + 段内地址
- 段表:程序的逻辑段在主存中存放位置的对照表,每行记录段号、装入位、段长
- CPU用虚拟地址访问时,先查段表有无该段,如果没有,则需要调入内存。
- 优点:每段具有逻辑独立性,便于共享
- 缺点:分配空间不便,容易在段间留下碎片。
3.6.4 段页式虚拟存储器
把程序按照逻辑结构分段,在每段内划分为固定大小的页,主存空间也划分为大小相等的也。调入、调出仍然以页为基本传送单位。
- 每个程序对应一个段表,每段对应一个页表,端的长度必须是页长的整数倍,端的起点是最开始页的起点。
- 虚拟地址 = 段号 + 段内页号 + 页内地址
- CPU 用虚拟地址访问时,先根据段号得到页表起始地址,那么就得到 页表地址 = 页表起始地址 + 段内页号
- 然后根据 页表地址 取出实页号,然后得到 物理地址 = 实页号 + 页内地址
- 优点:兼具页式和段式的优点
- 缺点:需要两次查表,开销较大
3.6.5 虚拟存储器和 Cache 的比较
相同点:
- 都是为了提高系统性能,都有容量、价格的梯度
- 都是划分成小信息块作为基本传递单位
- 都有地址映射、替换算法、更新策略的问题
- 都运用了程序局部性原理
不同点:
- Cache 主要解决系统速度,虚存为了解决主存容量太小的问题
- Cache 全由硬件实现,对程序员透明;虚拟存储器有操作系统和硬件共同实现,对系统程序员不透明,对应用程序员透明
- Page miss 比 Cache miss 的影响更大
- 主存可以和 CPU 通信,而辅存不可以和 CPU 通信,需要先调入主存再和 CPU 通信